Arduino之US015高分辨超声波测距模块
超声波测距原理
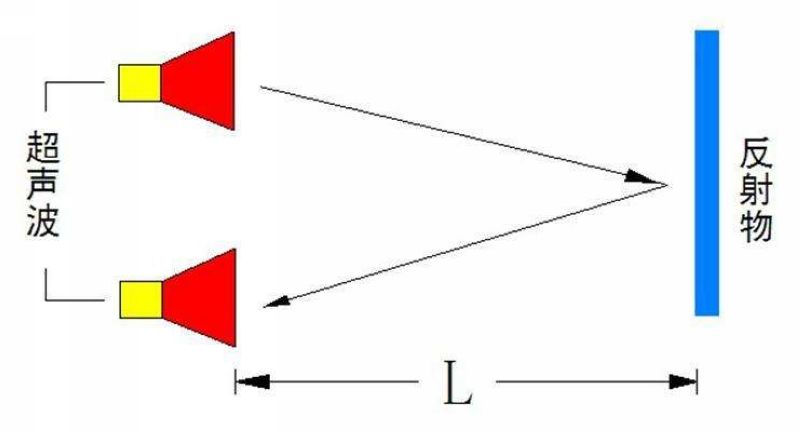
超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t(秒),就可以计算出发射点距障碍物的距离(s),即:s=340t/2)
US-015 超声波测距模块
US-015是目前市场上分辨率最高,重复测量一致性最好的超声波测距模块;US-015的分辨率高于1mm,可达0.5mm,测距精度高;重复测量一致性好,测距稳定可靠。US-015超声波测距模块可实现2cm~4m的非接触测距功能,供电电压为5V,工作电流为2.2mA,支持GPIO通信模式,工作稳定可靠。
代码
/*
项目:测试距离(单位mm)
原理:声波在空气中传播速度为340m/s,根据计时器记录时间t,即可算出发射点距离障碍物的距离S,即S=340m/s*t/2,这就是所谓的时间差测距法。
//连线方法
//MPU-UNO
//VCC-5V
//GND-GND
//Echo-D2
//Trig-D3
*/
unsigned int EchoPin = 3;
unsigned int TrigPin = 2;
unsigned long Time_Echo_us = 0;
unsigned long Len_mm = 0;
void setup()
{ //Initialize
Serial.begin(9600); //Serial: output result to Serial monitor
pinMode(EchoPin, INPUT); //Set EchoPin as input, to receive measure result from US-015
pinMode(TrigPin, OUTPUT); //Set TrigPin as output, used to send high pusle to trig measurement (>10us)
}
void loop()
{
digitalWrite(TrigPin, HIGH); //begin to send a high pulse, then US-015 begin to measure the distance
delayMicroseconds(20); //set this high pulse width as 20us (>10us)
digitalWrite(TrigPin, LOW); //end this high pulse
Time_Echo_us = pulseIn(EchoPin, HIGH); //calculate the pulse width at EchoPin,
if((Time_Echo_us < 60000) && (Time_Echo_us > 1)) //a valid pulse width should be between (1, 60000).
{
Len_mm = (Time_Echo_us*34/100)/2; //calculate the distance by pulse width, Len_mm = (Time_Echo_us * 0.34mm/us) / 2 (mm)
Serial.print("Present Distance is: "); //output result to Serial monitor
Serial.print(Len_mm, DEC); //output result to Serial monitor
Serial.println("mm"); //output result to Serial monitor
}
delay(1000); //take a measurement every second (1000ms)
}